导航算法:
有了位置、高度、地速、空速、姿态,我们就可以根据这些参数来进行计算,控制飞机给出相应舵面,实现导航、定高的目的。
最简单的导航算法只考虑当前飞机所在点和目标点。设想一下,飞机在空中飞行时,当前点和目标点的连线指定了飞机应该飞行的航向(即目标航向),如果要使飞机朝向目标点飞行,必须控制飞机转弯,使飞机航向与目标航向一致。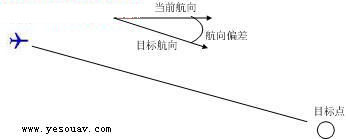
为了准确描述航向,我们定义以正北为0度,顺时针起航向与正北的夹角为正,逆时针起航向与正北的夹角为负,这样将航向定义在-180度到+180度之间。这样,上例中,飞机的航向为90度,目标航向为120度左右。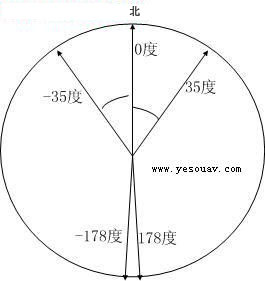
好了,当前飞机的航向我们可以从GPS航向里提取,我们记其为Hangxiang。下面我们怎么根据目标点和当前点的坐标来计算目标航向呢?我们把目标航向记为beta,于是航向偏差为beta-Hangxiang。
记当前的经纬度为CurLongi、CurLatti,单位为度;目标点经纬度为tgtLongi、tgtLatti,单位为度。由平面几何的知识,我们计算反正切atan((tgtLongi-CurLongi)/(tgtLatti-CurLatti)),再经过象限处理,就可得到目标航向。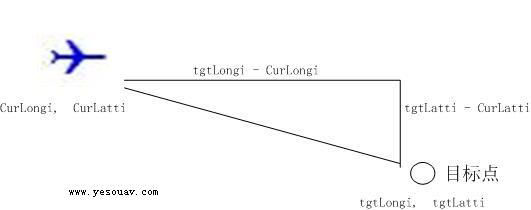
在实际程序中,我们是这样做的:
vectorLatti = tgtLatti - CurLatti;
vectorLongi = tgtLongi - CurLongi;
beta = CalAtanVector(); //计算vectorLongi、vectorLatti向量与正北的夹角
而CalAtanVector()函数如下:
float CalAtanVector(void) //计算vectorLongi/vectorLatti的反正切函数,返回范围在-PI~PI之间
{
float beta;
float lTemp;
if(vectorLatti > 0)
bNorth = 1;
else
bNorth = 0;
if(vectorLongi > 0)
bEast = 1;
else
bEast = 0;
vectorLatti = fabsf(vectorLatti);
vectorLongi = fabsf(vectorLongi);
vectorLongi = vectorLongi * COS_FACTOR;
if(vectorLongi > vectorLatti)
{
lTemp = vectorLongi;
vectorLongi = vectorLatti;
vectorLatti = lTemp;
bGT45 = 1;
}
else
{
bGT45 = 0;
}
if (vectorLatti!=0)
beta= atan(vectorLongi/vectorLatti); //0~PI/4范围
else
beta = PI/2;
if(bGT45)
beta = PI/2 - beta; //PI/4~PI/2范围
if(bNorth && bEast)
beta = beta; //0~PI/4范围
if(bNorth && !bEast)
beta = 0 - beta; //-PI/4~0范围
if(!bNorth && !bEast)
beta = beta - PI; //-PI~-3PI/4范围
if(!bNorth && bEast)
beta = PI - beta; //3PI/4~PI范围
return beta;
}
其中出现了一个因数COS_FACTOR,这是当前纬度的余弦值。这是因为两点经度之差要乘以当前纬度的余弦值,才代表了两点水平距离之差。也就是说,同样的经度差,在赤道附近表征很大的距离,而在北极附近表征的距离就相对较小,这一点大家应该能理解。
好了,现在已经得到了alpha = beta – Hangxiang,即为当前航向与目标航向的偏差角,当不需要压航线进行控制的时候,比如进行所点即所到、临时改变航点的时候,就可以用alpha作为PID控制的误差输入量,去计算应该给出的方向舵控制量(方向舵转弯时)或横滚坡度量(副翼转弯时)了。
当需要压航线进行飞行的时候呢?同样,我们可以根据航线的上一个点(坐标记为tgtLongi_s,tgtLatti_s)和航线的当前点,按照同上的算法计算出当前航线与正北的夹角,记为beta2,如下:
vectorLatti = tgtLatti - tgtLatti_s;
vectorLongi = tgtLongi - tgtLongi_s;
beta2 = CalAtanVector(); //航线与正北的夹角
然后我们需要再计算一个重要的量——偏航距,即飞机所在点到航线的距离。需要压航线时,飞机需要尽快的回到航线上,而不仅仅是朝着目标点。
我们用一个newdistance()函数来计算偏航距。大家可以回忆一下高中数学里的点到直线的距离公式:
float newdistance(void) //计算当前点与当前航线的距离
{
float dis,sin_t,cos_t;
dis = sqrt( (tgtLatti - tgtLatti_s) * (tgtLatti - tgtLatti_s) + (tgtLongi - tgtLongi_s) * (tgtLongi - tgtLongi_s) * COS_FACTOR * COS_FACTOR );
if (dis!=0)
{
sin_t = (tgtLatti - tgtLatti_s) / dis;
cos_t = (tgtLongi - tgtLongi_s) * COS_FACTOR / dis;
}
else
{
sin_t = 0;
cos_t = 0;
}
dis = (CurLongi - tgtLongi) * sin_t * COS_FACTOR + (tgtLatti - CurLatti) * cos